
- Read more about DEEP LEARNING VS. TRADITIONAL ALGORITHMS FOR SALIENCY PREDICTION OF DISTORTED IMAGES
- Log in to post comments
Saliency has been widely studied in relation to image quality assessment (IQA). The optimal use of saliency in IQA metrics, however, is nontrivial and largely depends on whether saliency can be accurately predicted for images containing various distortions. Although tremendous progress has been made in saliency modelling, very little is known about whether and to what extent state-of-the-art methods are beneficial for saliency prediction of distorted images.
- Categories:
 20 Views
20 Views

- Read more about Joint Demosaicking / Rectification of Fisheye Camera Images using Multi-color Graph Laplacian Regularization
- Log in to post comments
- Categories:
10 Views
- Read more about Open-Set Metric Learning for Person Re-identification in The Wild
- Log in to post comments
Person re-identification in the wild needs to simultaneously (frame-wise) detect and re-identify persons and has wide utility in practical scenarios. However, such tasks come with an additional open-set re-ID challenge as all probe persons may not necessarily be present in the (frame-wise) dynamic gallery. Traditional or close-set re-ID systems are not equipped to handle such cases and raise several false alarms as a result. To cope with such challenges open-set metric learning (OSML), based on the concept of Large margin nearest neighbor (LMNN) approach, is proposed.
- Categories:
94 Views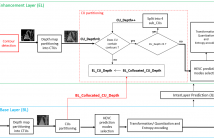
- Read more about DEPTH MAPS FAST SCALABLE COMPRESSION BASED ON CODING UNIT DEPTH
- Log in to post comments
- Categories:
19 Views
- Read more about 3D Point Cloud Enhancement using Graph-Modelled Multiview Depth Measurements
- Log in to post comments
A 3D point cloud is often synthesized from depth measurements collected by sensors at different viewpoints. The acquired measurements are typically both coarse in precision and corrupted by noise. To improve quality, previous works denoise a synthesized 3D point cloud a posteriori, after projecting the imperfect depth data onto the 3D space. Instead, we enhance depth measurements on the sensed images a priori, exploiting inherent 3D geometric correlation across views, before synthesizing a 3D point cloud from the improved measurements.
- Categories:
9 Views
The multi-modality sensor fusion technique is an active research
area in scene understating. In this work, we explore
the RGB image and semantic-map fusion methods for depth
estimation. The LiDARs, Kinect, and TOF depth sensors are
unable to predict the depth-map at illuminate and monotonous
pattern surface. In this paper, we propose a semantic-to-depth
generative adversarial network (S2D-GAN) for depth estimation
from RGB image and its semantic-map. In the first stage,
the proposed S2D-GAN estimates the coarse level depthmap
- Categories:
17 Views
- Read more about Egok360: A 360 Egocentric Kinetic Human Activity Video Dataset
- Log in to post comments
Recently, there has been a growing interest in wearable sensors which provides new research perspectives for 360 ° video analysis. However, the lack of 360 ° datasets in literature hinders the research in this field. To bridge this gap, in this paper we propose a novel Egocentric (first-person) 360° Kinetic human activity video dataset (EgoK360). The EgoK360 dataset contains annotations of human activity with different sub-actions, e.g., activity Ping-Pong with four sub-actions which are pickup-ball, hit, bounce-ball and serve.
- Categories:
16 Views
- Read more about Sparse Directed Graph Learning for Head Movement Prediction in 360 Video Streaming
- Log in to post comments
High-definition 360 videos encoded in fine quality are typically too large in size to stream in its entirety over bandwidth (BW)-constrained networks. One popular remedy is to interactively extract and send a spatial sub-region corresponding to a viewer's current field-of-view (FoV) in a head-mounted display (HMD) for more BW-efficient streaming. Due to the non-negligible round-trip-time (RTT) delay between server and client, accurate head movement prediction that foretells a viewer's future FoVs is essential.
- Categories:
44 Views