Documents
Presentation Slides
Disparity Map Estimation from Cross-modal Stereo
- Citation Author(s):
- Submitted by:
- Thapanapong Ruk...
- Last updated:
- 28 November 2018 - 12:15am
- Document Type:
- Presentation Slides
- Document Year:
- 2018
- Event:
- Presenters:
- Thapanapong Rukkanchanunt
- Paper Code:
- MHI-L.2.4
- Categories:
- Log in to post comments
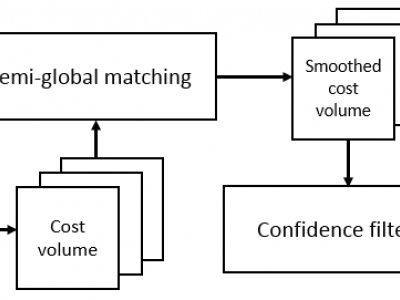
Mono-modal stereo matching problem has been studied for decades. The introduction of cross-modal stereo systems in industrial scene increases the interest in cross-modal stereo matching. The existing algorithms mostly consider mono-modal setting so they do not translate well in cross-modal setting. Recent development for cross-modal stereo considers small local matching and focus mainly on joint enhancement. Therefore, we propose a guided filter-based stereo matching algorithm. It works by integrating guided filter equation in a basic cost function for cost volume generation. The cost volume can be further improved via smoothness constraints and confidence filtering. We show that the proposed algorithm is able to estimate disparity correctly within acceptable interval in many important regions and outperforms many existing algorithms. We believe that the proposed algorithm will become the new benchmark for cross-modal stereo matching problem.

