Documents
Poster
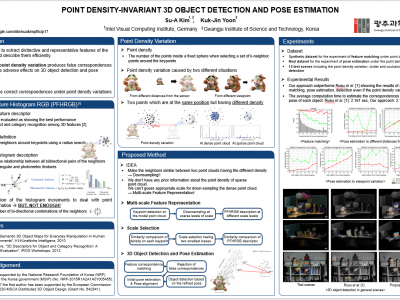
POINT DENSITY-INVARIANT 3D OBJECT DETECTION AND POSE ESTIMATION
- Citation Author(s):
- Submitted by:
- sua kim
- Last updated:
- 12 September 2017 - 12:20pm
- Document Type:
- Poster
- Document Year:
- 2017
- Event:
- Presenters:
- Sua Kim
- Paper Code:
- MP-PG.6
- Categories:
- Log in to post comments
For 3D object detection and pose estimation, it is crucial to extract distinctive and representative features of the objects and describe them efficiently. Therefore, a large number of 3D feature descriptors has been developed. Among these, Point Feature Histogram RGB (PFHRGB) has been evaluated as showing the best performance for 3D object and category recognition. However, this descriptor is vulnerable to point density variation and produces many false correspondences accordingly. In this paper, we tackle this problem and propose an algorithm to find the correct correspondences under the point density variation. Experimental results show that the proposed method is promising for 3D object detection and pose estimation under the point density variation.

