Documents
Presentation Slides
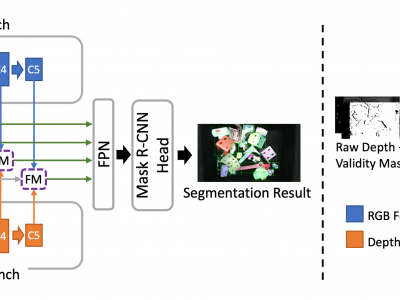
Segmenting Unseen Industrial Components In A Heavy Clutter Using RGB-D Fusion And Synthetic Data
- Citation Author(s):
- Submitted by:
- Seunghyeok Back
- Last updated:
- 15 November 2020 - 3:24am
- Document Type:
- Presentation Slides
- Document Year:
- 2020
- Event:
- Presenters:
- Seunghyeok Back
- Paper Code:
- 3032
- Categories:
- Log in to post comments
Segmentation of unseen industrial parts is essential for autonomous industrial systems. However, industrial components are texture-less, reflective, and often found in cluttered and unstructured environments with heavy occlusion, which makes it more challenging to deal with unseen objects. To tackle this problem, we present a synthetic data generation pipeline that randomizes textures via domain randomization to focus on the shape information. In addition, we propose an RGB-D Fusion Mask R-CNN with a confidence map estimator, which exploits reliable depth information in multiple feature levels. We transferred the trained model to real-world scenarios and evaluated its performance by making comparisons with baselines and ablation studies. We demonstrate that our methods, which use only synthetic data, could be effective solutions for unseen industrial components segmentation.

