Documents
Research Manuscript
Coherent long-time integration and Bayesian detection with Bernoulli track-before-detect
- DOI:
- 10.60864/6eth-s497
- Citation Author(s):
- Submitted by:
- Murat Uney
- Last updated:
- 17 November 2023 - 12:08pm
- Document Type:
- Research Manuscript
- Document Year:
- 2023
- Event:
- Presenters:
- Murat Uney
- Paper Code:
- SPTM-P1.1
- Categories:
- Log in to post comments
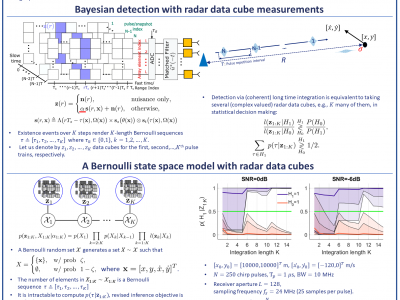
We consider the problem of detecting small and manoeuvring objects with staring array radars. Coherent processing and long-time integration are key to addressing the undesirably low signal-to-noise/background conditions in this scenario and are complicated by the object manoeuvres. We propose a Bayesian solution that builds upon a Bernoulli state space model equipped with the likelihood of the radar data cubes through the radar ambiguity function. Likelihood evaluation in this model corresponds to coherent long-time integration. The proposed processing scheme consists of Bernoulli filtering within expectation maximisation iterations that aims at approximately finding complex reflection coefficients. We demonstrate the efficacy of our approach in a simulation example.

