Documents
Poster
Poster
Nonlinear State Estimation using Particle Filters on the Stiefel Manifold
- Citation Author(s):
- Submitted by:
- Claudio Bordin Jr.
- Last updated:
- 8 May 2019 - 4:39pm
- Document Type:
- Poster
- Document Year:
- 2019
- Event:
- Presenters:
- Claudio Bordin Jr.
- Paper Code:
- SPTM-P2.3
- Categories:
- Log in to post comments
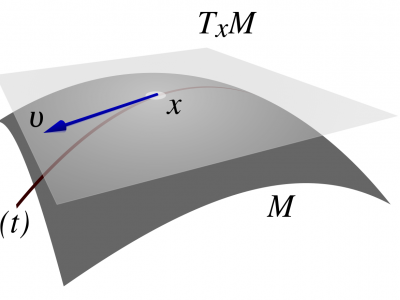
Many problems in statistical signal processing involve tracking the state of a dynamic system that evolves on a Stiefel manifold. To this aim, we introduce in this paper a novel particle filter algorithm that approximates the optimal importance function on the Stiefel manifold and is capable of handling nonlinear observation functions. To sample from the required importance function, we develop adaptations of previous MCMC algorithms. We verify via numerical simulations that, in a scenario with a strongly nonlinear observation model, the new proposed method outperforms existing algorithms that use the prior importance function at the cost, however, of increased computational complexity.

