Documents
Presentation Slides
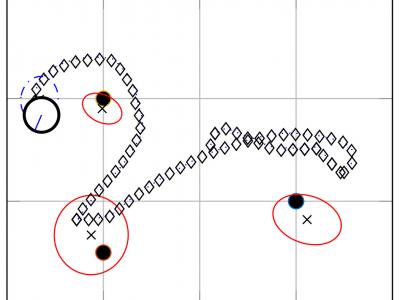
Potential-field-based active exploration for acoustic simultaneous localization and mapping
- Citation Author(s):
- Submitted by:
- Christopher Schymura
- Last updated:
- 13 April 2018 - 5:58am
- Document Type:
- Presentation Slides
- Document Year:
- 2018
- Event:
- Presenters:
- Christopher Schymura
- Paper Code:
- 1968
- Categories:
- Log in to post comments
This paper presents a novel framework for active exploration in the context of acoustic \gls{SLAM} using a microphone array mounted on a mobile robotic agent. Acoustic \gls{SLAM} aims at building a map of acoustic sources present in the environment and simultaneously estimating the agent's own trajectory and position within this map. Two important aspects of this task are robustness against disturbances arising from reverberation and sensor imperfections and an appropriate degree of exploration to achieve high map accuracy. Several approaches to the latter aspect using information-theoretic measures have recently been proposed. This study extends these approaches into a framework based on the potential field method, which is a widely used technique for robotic path planning and navigation. It allows to determine exploratory movement trajectories for the robotic agent via gradient descent, without requiring computationally expensive Monte Carlo simulations to predict the effects of specific trajectory choices. Furthermore, additional constraints like maintaining a safe distance to acoustic sources can easily be integrated into this framework. Experimental evaluation demonstrates that the proposed method yields adequate exploration strategies of the acoustic environment leading to accurate map estimates.

