Documents
Poster
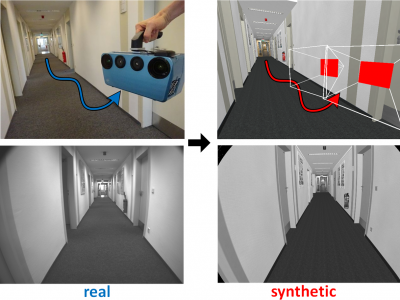
Simulation Framework for a Visual-Inertial Navigation System
- Citation Author(s):
- Submitted by:
- Patrick Irmisch
- Last updated:
- 18 September 2019 - 3:18am
- Document Type:
- Poster
- Document Year:
- 2019
- Event:
- Presenters:
- Patrick Irmisch
- Paper Code:
- 2202
- Categories:
- Log in to post comments
The ability to test methods based on simulated data is an important component in the development of intelligent localization systems at the present time. This includes the replication of realistic environments and sensors on the one hand. On the other hand, an implementation of a correct movement profile of the target mobile platform is required. This is complicated by the large variety of possible platform variants. We propose a method to transfer movement profiles that have been recorded in real world into a simulation environment. The associated modular simulation framework was designed especially, but not limiting, for the development of visual-inertial odometry of a handheld navigation system. We demonstrate the application of our pipeline through an experiment to determine the influence of motion blur on the visual odometry component.

