Documents
Poster
Towards Multi-rigid Body Localization
- Citation Author(s):
- Submitted by:
- andrea pizzo
- Last updated:
- 16 March 2016 - 5:41am
- Document Type:
- Poster
- Document Year:
- 2016
- Event:
- Presenters:
- Andrea Pizzo
- Categories:
- Log in to post comments
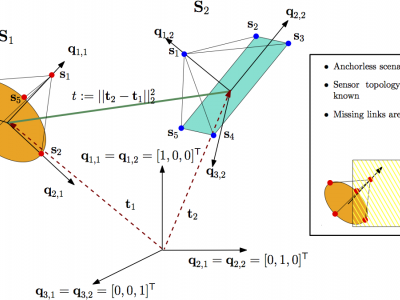
In this paper we focus on the relative position and orientation estimation between rigid bodies in an anchorless scenario. Several sensor units are installed on the rigid platforms, and the sensor placement on the rigid bodies is known beforehand (i.e., relative locations of the sensors on the rigid body are known). However, the absolute position of the rigid bodies is not known. We show that the relative localization of rigid bodies amounts to the estimation of a rotation matrix and the relative distance between the centroids of the rigid bodies. We measure all the unknown pairwise distances between the sensors, which we use in a constrained least squares estimator. Furthermore, we also allow missing links between the sensors. The simulations support the developed theory.

