
- Read more about Improving a User's Haptic Perceptual Sensitivity by Optimizing Effective Manipulability of a Redundant User Interface
- Log in to post comments
Human perceptual sensitivity of various types of forces, e.g., stiffness and friction, is important for surgeons during robotic surgeries such as needle insertion and palpation. However, force feedback from robot end-effector is usually a combination of desired and undesired force components which could have an effect on the perceptual sensitivity of the desired one. In presence of undesired forces, to improve perceptual sensitivity of desired force could benefit robotic surgical outcomes.
- Categories:
 15 Views
15 Views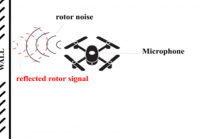
In this paper, we propose a method to estimate the proximity of an acoustic reflector, e.g., a wall, using ego-noise, i.e., the noise produced by the moving parts of a listening robot. This is achieved by estimating the times of arrival of acoustic echoes reflected from the surface. Simulated experiments show that the proposed non-intrusive approach is capable of accurately estimating the distance of a reflector up to 1 meter and outperforms a previously proposed intrusive approach under loud ego-noise conditions.
- Categories:
16 Views
- Read more about Experiences in using the Pepper Robotic Platform for Museum Assistance Applicatons
- Log in to post comments
This paper presents the software architecture of a robotic museum guide application called CUMA.
It is intended to run upon the Pepper robotic platform and has the objective of guiding visitors of a museum accompanying them in the tour, explaining museum works, and interacting with them in order to gather feedback.
- Categories:
27 Views