Documents
Poster
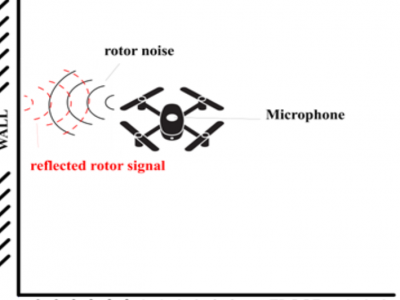
Detecting Acoustic Reflector using a Robot's Ego-noise
- Citation Author(s):
- Submitted by:
- Usama Saqib
- Last updated:
- 25 June 2021 - 6:44am
- Document Type:
- Poster
- Document Year:
- 2021
- Event:
- Presenters:
- Usama Saqib
- Paper Code:
- AUD-17.2
- Categories:
- Keywords:
- Log in to post comments
In this paper, we propose a method to estimate the proximity of an acoustic reflector, e.g., a wall, using ego-noise, i.e., the noise produced by the moving parts of a listening robot. This is achieved by estimating the times of arrival of acoustic echoes reflected from the surface. Simulated experiments show that the proposed non-intrusive approach is capable of accurately estimating the distance of a reflector up to 1 meter and outperforms a previously proposed intrusive approach under loud ego-noise conditions. The proposed method is helped by a probabilistic echo detector that estimates whether or not an acoustic reflector is within a short range of the robotic platform. This preliminary investigation paves the way towards a new kind of collision avoidance system that would purely rely on audio sensors rather than conventional proximity sensors.

