- Read more about Variational Fusion of Time-of-Flight and Stereo Data Using Edge Selective Joint Filtering
- Log in to post comments
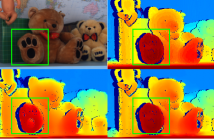
In this paper, we propose variational fusion of time-of-flight (TOF) and stereo data using edge selective joint filtering (ESJF). We utilize ESJF to up-sample low-resolution (LR) depth captured by TOF camera and produce high-resolution (HR)depth maps with accurate edge information. First, we measure confidence of two sensor with different reliability to fuse them. Then, we up-sample TOF depth map using ESJF to generate discontinuity maps and protect edges in depth. Finally, we perform variational fusion of TOF and stereo depth data based on total variation (TV) guided by discontinuity maps.
- Categories:
 36 Views
36 ViewsPages
- « first
- ‹ previous
- 1
- 2
- 3