- Signal and System Modeling, Representation and Estimation
- Multirate Signal Processing
- Sampling and Reconstruction
- Nonlinear Systems and Signal Processing
- Filter Design
- Adaptive Signal Processing
- Statistical Signal Processing

- Read more about Sparse Support Recovery via Covariance Estimation
- Log in to post comments
We consider the problem of recovering the common support of a set of
$k$-sparse signals $\{\mathbf{x}_{i}\}_{i=1}^{L}$ from noisy linear
underdetermined measurements of the form
$\{{\Phi} \mathbf{x}_{i}+\mathbf{w}_{i}\}_{i=1}^{L}$ where
${\Phi}\in\rr^{m\times N}$ $(m<N)$ is the sensing matrix and
$\mathbf{w}_{i}$ is the additive noise. We employ a Bayesian setup where we impose a Gaussian prior with zero mean and a
common diagonal covariance matrix $\mathbf{\Gamma}$ across all
icassp_v3.pdf
- Categories:
 20 Views
20 Views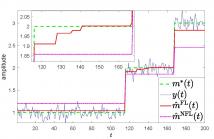
- Read more about CONSISTENT CHANGE POINT DETECTION FOR PIECEWISE CONSTANT SIGNALS WITH NORMALIZED FUSED LASSO
- Log in to post comments
poster.pdf
- Categories:
9 Views
The mutual interference between similar radar systems can result in reduced radar sensitivity and increased false alarm rates.
To address the interference mitigation problems in similar radar systems, we propose herein two slow-time coding schemes to modulate the pulses within a coherent processing interval (CPI).
The incorporation of the coding schemes only requires slight modification of the existing systems.
- Categories:
33 Views
- Categories:
40 Views
- Read more about UNEQUAL ERROR PROTECTION QUERYING POLICIES FOR THE NOISY 20 QUESTIONS PROBLEM
- Log in to post comments
We propose a non-adaptive unequal error protection (UEP) querying policy based on superposition coding for the noisy 20 questions problem.
In this problem, a player wishes to successively refine an estimate of the value of a continuous random variable by posing binary queries and receiving noisy responses.
When the queries are designed non-adaptively as a single block and the noisy responses are modeled as the outputs of a binary symmetric channel the 20 questions problem can be mapped to an equivalent problem of channel coding with UEP.
poster.pdf
- Categories:
3 Views
- Read more about RECOVERING SIGNALS FROM THEIR FROG TRACE
- Log in to post comments
- Categories:
3 Views
- Categories:
1 Views
- Read more about ROBUST OBJECT-AWARE SAMPLE CONSENSUS WITH APPLICATION TO LIDAR ODOMETRY
- Log in to post comments
Random sample consensus (RANSAC) is a popular paradigm for parameter estimation with outlier detection, which plays an essential role in 3D robot vision, especially for LiDAR odometry. The success of RANSAC strongly depends on the probability of selecting a subset of pure inliers, which sets barriers to robust and fast parameter estimation. Although significant efforts have been made to improve RANSAC in various scenarios, its strong dependency on inlier selection is still a problem.
海报0411晚修改.pdf
- Categories:
3 Views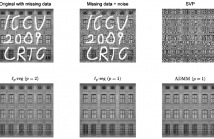
Matrix completion refers to the recovery of a low‐rank matrix from only a subset of its possibly noisy entries, and has a variety of important applications such as collaborative filtering, image inpainting and restoration, system identification, node localization and genotype imputation. It is because many real-world signals can be approximated by a matrix whose rank is much smaller than the row and column numbers. Most techniques for matrix completion in the literature assume Gaussian noise and thus they are not robust to outliers.
- Categories:
386 Views- Read more about Multiband TDOA Estimation from Sub-Nyquist Samples with Distributed Sensing Nodes
- Log in to post comments
- Categories:
12 Views