Documents
Poster
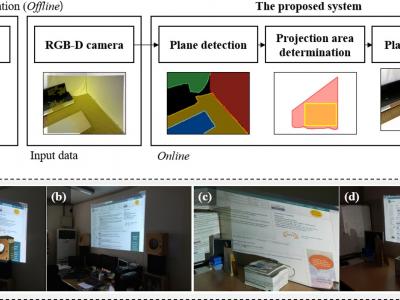
REALTIME PLANE DETECTION FOR PROJECTION AUGMENTED REALITY IN AN UNKNOWN ENVIRONMENT
- Citation Author(s):
- Submitted by:
- Tack Han
- Last updated:
- 11 March 2017 - 8:49pm
- Document Type:
- Poster
- Document Year:
- 2017
- Event:
- Presenters:
- Tack-Don Han
- Paper Code:
- IOT-P1.3
- Categories:
- Log in to post comments
We propose a real-time plane detection method for projection-based Augmented Reality (AR) system in an unknown environment. While previous works usually designate space, the plane detection method automatically detects multiple planes based on the proposed constrained sampling strategy in RAndom SAmpleing Concensus (RANSAC). For each plane, an area for projection is selected for contents while considering occlusions by other objects. In addition, when the multiple planes are detected, the importance for contents is measured by the score functions based on the properties of planes such as size, color, and position. The proposed method can guide users to select plane for projection by visualizing the importances, or can automatically select a plane according to the users. We achieves a significant improvement in speed (about 260 times faster than the RANSAC) and high precision. These technique has become widely utilized in various AR applications such as AR game, and etc.

