- Read more about Fast 6dof Pose Estimation with Synthetic Textureless Cad Model for Mobile Applications
- Log in to post comments
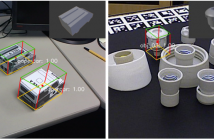
Performance of 6DoF pose estimation techniques from RGB/RGB-D images has improved significantly with sophisticated deep learning frameworks. These frameworks require large-scale training data based on real/synthetic RGB/RGB-D information. Difficulty of obtaining adequate training data has limited the scope of these frameworks for ubiquitous application areas. Also, fast pose estimation at inference time often requires high-end GPU(s) that restricts the scope for its application in mobile hardware.
- Categories:
 218 Views
218 Views
Visual tracking is a very important and challenging problem in the field of computer vision. In recent years, Siamese networks have been widely used for visual tracking due to their fast tracking speed, but many trackers based on Siamese network train their networks by utilizing either pairwise loss or triplet loss, which easily leads to over-fitting. In addition, it is difficult to distinguish some hard samples in the training samples. In this paper, we propose a novel global similarity loss to train the network.
- Categories:
18 Views