- Image/Video Storage, Retrieval
- Image/Video Processing
- Image/Video Coding
- Image Scanning, Display, and Printing
- Image Formation

- Read more about Progressive Filtering for Feature Matching
- Log in to post comments
In this paper, we propose a simple yet efficient method termed as Progressive Filtering for Feature Matching, which is able to establish accurate correspondences between two images of common or similar scenes. Our algorithm first grids the correspondence space and calculates a typical motion vector for each cell, and then removes false matches by checking the consistency between each putative match and the typical motion vector in the corresponding cell, which is achieved by a convolution operation.
poster11.pdf
- Categories:
 30 Views
30 Views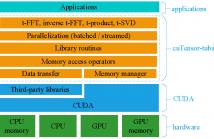
- Read more about CUTENSOR-TUBAL: OPTIMIZED GPU LIBRARY FOR LOW-TUBAL-RANK TENSORS
- Log in to post comments
In this paper, we optimize the computations of third-order low-tubal-rank tensor operations on many-core GPUs. Tensor operations are compute-intensive and existing studies optimize such operations in a case-by-case manner, which can be inefficient and error-prone. We develop and optimize a BLAS-like library for the low-tubal-rank tensor model called cuTensor-tubal, which includes efficient GPU primitives for tensor operations and key processes. We compute tensor operations in the frequency domain and fully exploit tube-wise and slice-wise parallelisms.
- Categories:
32 Views
- Read more about Classification of Severely Occluded Image Sequences via Convolutional Recurrent Neural Networks
- Log in to post comments
- Categories:
23 Views
- Read more about Sparse tensor recovery via N-mode FISTA with support augmentation
- Log in to post comments
- Categories:
12 Views- Read more about Sparse tensor recovery via N-mode FISTA with support augmentation
- Log in to post comments
- Categories:
16 Views
- Read more about The Greedy Dirichlet Process Filter - An Online Clustering Multi-Target Tracker
- Log in to post comments
Reliable collision avoidance is one of the main requirements for autonomous driving.
Hence, it is important to correctly estimate the states of an unknown number of static and dynamic objects in real-time.
Here, data association is a major challenge for every multi-target tracker.
We propose a novel multi-target tracker called Greedy Dirichlet Process Filter (GDPF) based on the non-parametric Bayesian model called Dirichlet Processes and the fast posterior computation algorithm Sequential Updating and Greedy Search (SUGS).
- Categories:
7 Views
- Categories:
14 Views
- Read more about PERFORMANCE EVALUATION OF OBJECTIVE QUALITY METRICS ON HLG-BASED HDR IMAGE CODING
- Log in to post comments
We evaluate the performance of objective quality metrics for high dynamic range (HDR) image coding that uses the transfer function (TF) of the Hybrid Log-Gamma (HLG) method. Previous evaluations of objective metrics for HDR image coding have studied which of them are reliable predictors of perceived quality; however, in those tests, all the non-linear transforms used both for encoding and by the best-performing metrics are essentially very similar and based on visual perception data of detection thresholds for lightness variations.
- Categories:
39 Views
- Read more about Single image super-resolution with limited number of filters
- Log in to post comments
In this paper, we propose a single image super-resolution with limited number of filters based on RAISR. RAISR is well known as rapid and accurate super-resolution method which utilizes 864 filters for upscaling. This super-resolution idea utilizes the filter learned with sufficient training set. To get low cost of calculation and comparable image quality with other highly accurate super-resolution methods, the patch of input image is classified into classes by simple hash calculation.
- Categories:
24 Views