- Read more about STROMULE BRANCH TIP DETECTION BASED ON ACCURATE CELL IMAGE SEGMENTATION
- Log in to post comments
Based on the dynamic structure, we design a system that can perform accurate stromule image segmentation, branch tip detection and tracking automatically. We substitute the user constraints in active contour segmentation by spatial fuzzy c-means clustering for providing more precise segmentation result. Based on the segmented contour after smoothing, we create a surface normal based feature that can accurately detect
the branch tips. We further combine normal information together with tip position coordinate to apply ICP to track the branch tips moving path.
- Categories:
 15 Views
15 Views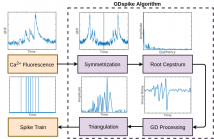
- Read more about GDSPIKE: AN ACCURATE SPIKE ESTIMATION ALGORITHM FROM NOISY CALCIUM FLUORESCENCE SIGNALS
- Log in to post comments
Accurate estimation of spike train from calcium (Ca2+) fluorescence signals is challenging owing to significant fluctuations of fluorescence level. This paper proposes a non-model-based approach for spike train inference using group delay (GD) analysis. It primarily exploits the property that change in Ca2+ fluorescence corresponding to a spike can be characterized by an onset, an attack, and a decay. The proposed algorithm, GDspike, is compared with state-of-the-art systems on five datasets. F-measure is best for GDspike (41%) followed by STM (40%), MLspike (39%), and Vogelstein (35%).
main_jilt.pdf
- Categories:
28 Views- Read more about ICASSP_poster_Paper_1008
- Log in to post comments
This paper proposes a reliable 3D fish tracking method using a novel master-slave camera setup. Instead of conventional dynamic models that rely on prior knowledge about target kinematics, the proposed method learns the kinematic model with a Long Short-Term Memory (LSTM) network. On this basis, the 3D state of fish at each moment is predicted by LSTM network. We propose to use an innovative master-view-tracking-first strategy. The fish are first tracked in the master view. Cross-view association is then established utilizing motion continuity and epipolar constraint cues.
- Categories:
7 Views
- Read more about A Hybrid Task Graph Scheduler for High Performance Image Processing Workflows
- Log in to post comments
The scalability of applications is a key requirement to improving performance in hybrid and cluster computing. Scheduling code to utilize parallelism is difficult, particularly when dealing with dependencies, memory management, data motion, and processor occupancy. The Hybrid Task Graph Scheduler (HTGS) increases programmer productivity to implement hybrid workflows that scale to multi-GPU systems.
- Categories:
17 Views- Read more about A Multi-Frame Optical Flow Spot Tracker
- Log in to post comments
Accurate and robust spot tracking is a necessary tool for quantitative motion analysis in fluorescence microscopy images. In this work, we exploits the underlying stationary motion in biological systems, e.g. the movement of crowds, bacteria swarming and cyclosis in plant cells, and then propose a multi-frame optical flow based tracker. We obtain the stationary motion by adapting a recent optical flow algorithm that relates one image to another locally using an all-pass filter.
- Categories:
43 ViewsPages
- « first
- ‹ previous
- 1
- 2
- 3