- Read more about LEARNABLE CONTEXTUAL REGULARIZATION FOR SEMANTIC SEGMENTATION OF INDOOR SCENE IMAGES
- Log in to post comments
Semantic segmentation of indoor scene images has a wide range of
applications. However, due to a large number of classes and uneven
distribution in indoor scenes, mislabels are often made when facing
small objects or boundary regions. Technically, contextual infor-
mation may benefit for segmentation results, but has not yet been
exploited sufficiently. In this paper, we propose a learnable contex-
tual regularization model for enhancing the semantic segmentation
results of color indoor scene images. This regularization model is
- Categories:
 12 Views
12 Views- Read more about Cross-scale Color Image Restoration Under High Density Salt-and-pepper Noise
- Log in to post comments
High-fidelity color image restoration is always of high de- manding for high-density noise corrupted images. Such problem becomes more challenging if the degraded image and the expected restored image are of different resolutions, as conventional ‘cascaded: denoising followed by sampling’ and ‘operation on RGB channel independently’ methods induce error amplification and color artifacts.
- Categories:
11 Views
- Read more about EFFICIENT CLOUD DETECTION IN REMOTE SENSING IMAGES USING EDGE-AWARE SEGMENTATION NETWORK AND EASY-TO-HARD TRAINING STRATEGY
- Log in to post comments
Detecting cloud regions in remote sensing image (RSI) is very challenging yet of great importance to meteorological forecasting and other RSI-related applications. Technically, this task is typically implemented as a pixel-level segmentation. However, traditional methods based on handcrafted or low-level cloud features often fail to achieve satisfactory performances from images with bright non-cloud and/or semitransparent cloud regions.
- Categories:
25 Views- Read more about Improving the Discrimination Between Foreground and Background for Semantic Segmentation
- Log in to post comments
- Categories:
7 Views- Read more about Tag Tree Creation of Social Image for Personalized Recommendation
- Log in to post comments
The tags are usually tagged by different users in social image sharing websites, which can indicate image semantic information and imply user's preference. Therefore, the tags can contribute to personalized recommendation of social image. However, the present social image tags models only consider single tag,resulting in the relationships among tags are ignored. In this paper, we propose a novel method to create tag tree of social image for personalized recommendation. Firstly, the tag ranking is realized to remove noisy tags.
- Categories:
47 Views- Read more about COMMUNITY DETECTION USING RANDOM-WALK SIMILARITY
- Log in to post comments
The technology used to detect community structures in graphs, or graph clustering technology, is important in a
wide range of disciplines, such as sociology, biology, and computer science. Previously, many successful community
- Categories:
273 Views
- Read more about Deep CNN with colorLines model for unmarked road segmentation
- Log in to post comments
Road detection from a monocular camera is a perception module in any advanced driver assistance or autonomous driving system. Traditional techniques work reasonably well for this problem when the roads are well maintained and the boundaries are clearly marked. However, in many developing countries or even for the rural areas in the developed countries, the assumption does not hold which leads to failure of such techniques.
- Categories:
23 ViewsIn this paper, we propose a novel closed-form transformation estimation method based on moving regularized least squares optimization with thin-plate spline (MRLS-TPS) for non-rigid image deformation. The method takes the user-controlled point-offset-vectors as the input data, and estimates the spatial transformation about the two control point sets for each pixel. To achieve a realistic deformation, we formulates the transformation estimation as a vector-field interpolation problem by a moving regularized least squares method.
icip_3286.pdf
- Categories:
51 Views- Read more about Camera spectral sensitivity, illumination and spectral reflectance estimation for a hybrid hyperspectral image capture system
- Log in to post comments
Report_new.pdf
- Categories:
10 Views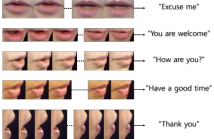
- Read more about MULTI-VIEW VISUAL SPEECH RECOGNITION BASED ON MULTI TASK LEARNING
- Log in to post comments
Visual speech recognition (VSR), also known as lip reading is a task that recognizes words or phrases using video clips of lip movement. Traditional VSR methods are limited in that they are based mostly on VSR of frontal-view facial movement. However, for practical application, VSR should include lip movement from all angles. In this paper, we propose a pose-invariant network which can recognize words spoken from any arbitrary view input.
- Categories:
142 Views