- Read more about STOCHASTIC TRUNCATED WIRTINGER FLOW ALGORITHM FOR PHASE RETRIEVAL USING BOOLEAN CODED APERTURES
- Log in to post comments
- Categories:
 9 Views
9 Views- Read more about Quality Assessment of Mobile Videos with In-Capture Distortions
- Log in to post comments
- Categories:
4 Views
- Read more about Retinex-Based Perceptual Contrast Enhancement in Images Using Luminance Adaptation
- Log in to post comments
In this paper, we propose retinex-based perceptual contrast enhancement in images using luminance adaptation. We use the retinex theory to decompose an image into illumination and reflectance layers, and adopt luminance adaptation to handle the illumination layer which causes detail loss. First, we obtain the illumination layer using adaptive Gaussian filtering to remove halo artifacts. Then, we adaptively remove illumination of the illumination layer in the multi-scale retinex (MSR) process based on luminance adaptation to preserve details.
- Categories:
70 Views- Read more about UNSUPERVISED FEATURE EXTRACTION FOR HYPERSPECTRAL IMAGES USING COMBINED LOW RANK REPRESENTATION AND LOCALLY LINEAR EMBEDDING
- Log in to post comments
Hyperspectral images(HSIs) provide hundreds of narrow spectral bands for the land-covers, thus can provide more powerful discriminative information for the land-cover classification. However, HSIs suffer from the curse of high dimensionality, therefore dimension reduction and feature extraction are essential for the application of HSIs. In this paper, we propose an unsupervised feature extraction method for HSIs using combined low rank representation and locally linear embedding (LRR LLE).
- Categories:
7 Views- Read more about BLIND IMAGE DEBLURRING BASED ON SPARSE REPRESENTATION AND STRUCTURAL SELF-SIMILARITY
- Log in to post comments
In this paper, we propose a blind motion deblurring method based on sparse representation and structural self-similarity from a single image.
- Categories:
9 Views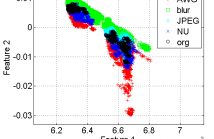
- Read more about STATISTICS OF NATURAL FUSED IMAGE DISTORTIONS
- Log in to post comments
The capability to automatically evaluate the quality of long wave infrared (LWIR) and visible light images has the potential to play an important role in determining and controlling the quality of a resulting fused LWIR-visible image. Extensive work has been conducted on studying the statistics of natural LWIR and visible light images. Nonetheless, there has been little work done on analyzing the statistics of fused images and associated distortions.
- Categories:
8 Views- Categories:
14 Views- Read more about STATISTICS OF NATURAL FUSED IMAGE DISTORTIONS
- Log in to post comments
The capability to automatically evaluate the quality of long wave infrared (LWIR) and visible light images has the potential to play an important role in determining and controlling the quality of a resulting fused LWIR-visible image. Extensive work has been conducted on studying the statistics of natural LWIR and visible light images. Nonetheless, there has been little work done on analyzing the statistics of fused images and associated distortions.
- Categories:
16 Views
- Read more about ORGB: OFFSET CORRECTION IN RGB COLOR SPACE FOR ILLUMINATION-ROBUST IMAGE PROCESSING
- Log in to post comments
Single materials have colors which form straight lines in RGB space. However, in severe shadow cases, those lines do not intersect the origin, which is inconsistent with the description of most literature. This paper is concerned with the detection and correction of the offset between the intersection and origin. First, we analyze the reason for forming that offset via an optical imaging model. Second, we present a simple and effective way to detect and remove the offset.
- Categories:
14 Views
- Read more about Scale Selective Extended Local Binary Pattern For Texture Classification
- Log in to post comments
In this paper, we propose a new texture descriptor, scale selective extended local binary pattern (SSELBP), to characterize texture images with scale variations. We first utilize multiscale extended local binary patterns (ELBP) with rotation invariant and uniform mappings to capture robust local micro and macro-features. Then, we build a scale space using Gaussian filters and calculate the histogram of multi-scale ELBPs for the image at each scale.
- Categories:
24 Views