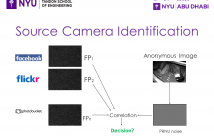
PRNU (Photo Response Non-Uniformity)-based camera fingerprints are useful for identifying the source camera of an anonymous image. As the query image has to be correlated with each candidate camera fingerprint, one key concern of this approach is the high run time overhead when using a large camera database. Clever techniques have been proposed to reduce the computation and I/O time either by reducing the size of the fingerprint or by group testing where multiple candidate fingerprints can be eliminated by a single correlation operation.
- Categories:
 20 Views
20 ViewsPRNU (Photo Response Non-Uniformity)-based camera fingerprints are useful for identifying the source camera of an anonymous image. As the query image has to be correlated with each candidate camera fingerprint, one key concern of this approach is the high run time overhead when using a large camera database. Clever techniques have been proposed to reduce the computation and I/O time either by reducing the size of the fingerprint or by group testing where multiple candidate fingerprints can be eliminated by a single correlation operation.
- Categories:
10 Views
PRNU (Photo Response Non-Uniformity)-based camera fingerprints are useful for identifying the source camera of an anonymous image. As the query image has to be correlated with each candidate camera fingerprint, one key concern of this approach is the high run time overhead when using a large camera database. Clever techniques have been proposed to reduce the computation and I/O time either by reducing the size of the fingerprint or by group testing where multiple candidate fingerprints can be eliminated by a single correlation operation.
- Categories:
13 Views
PRNU (Photo Response Non-Uniformity)-based camera fingerprints are useful for identifying the source camera of an anonymous image. As the query image has to be correlated with each candidate camera fingerprint, one key concern of this approach is the high run time overhead when using a large camera database. Clever techniques have been proposed to reduce the computation and I/O time either by reducing the size of the fingerprint or by group testing where multiple candidate fingerprints can be eliminated by a single correlation operation.
- Categories:
19 Views
- Read more about DEEP MATCH TRACKER: CLASSIFYING WHEN DISSIMILAR, SIMILARITY MATCHING WHEN NOT
- Log in to post comments
Visual tracking frameworks employing Convolutional Neural Networks (CNNs) have shown state-of-the-art performance due to their hierarchical feature representation. While classification and update based deep neural net tracking have shown good performance in terms of accuracy, they have poor tracking speed. On the other hand, recent matching based techniques using CNNs show higher than real-time speed in tracking but this speed is achieved at a considerably lower accuracy.
- Categories:
12 Views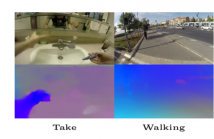
- Read more about Making Third Person Techniques Recognize First-Person Actions in Egocentric Videos
- Log in to post comments
We focus on first-person action recognition from egocentric videos. Unlike third person domain, researchers have divided first-person actions into two categories: involving hand-object interactions and the ones without, and developed separate techniques for the two action categories. Further, it has been argued that traditional cues used for third person action recognition do not suffice, and egocentric specific features, such as head motion and handled objects have been used for such actions.
- Categories:
22 Views
Computer-aided diagnosis (CAD) has great potential in providing real benefits to doctors and patients. Recent studies have, however, found lack of trust in CAD by radiologists in clinical diagnostic decision making. One of the main reasons is the lack of an appropriate confidence measure. This paper presents the first-ever study of classification confidence in the context of breast mass classification.
- Categories:
19 Views
- Read more about RECOVERING TEXTURE OF DENOISED IMAGE VIA ITS STATISTICAL ANALYSIS
- Log in to post comments
ICIPposter.pdf
- Categories:
6 Views