
- Read more about Robust gridless sound field decomposition based on structured eciprocity gap functional in spherical harmonic domain
- Log in to post comments
A sound field reconstruction method for a region including sources is proposed. Under the assumption of spatial sparsity of the sources,this reconstruction problem has been solved by using sparse decomposition algorithms with the discretization of the target region. Since this discretization leads to the off-grid problem, we previously proposed a gridless sound field decomposition method based on the reciprocity gap functional in the spherical harmonic domain.
- Categories:
 28 Views
28 Views
- Read more about PRACTICAL CONCENTRIC OPEN SPHERE CARDIOID MICROPHONE ARRAY DESIGN FOR HIGHER ORDER SOUND FIELD CAPTURE
- Log in to post comments
The problem of higher order sound field capture with spherical microphone arrays is considered. While A-format cardioid designs are commonplace for first order capture, interest remains in the increased spatial resolution delivered by higher order arrays. Spherical arrays typically use omnidirectional microphones mounted on a rigid baffle, from which higher order spatial components are estimated by accounting for radial mode strength.
- Categories:
43 Views
- Read more about Combining Artificial and Natural Background Noise in Personal Audio Systems
- Log in to post comments
Personal audio systems are designed to deliver spatially separated regions of audio to individual listeners. This paper presents a method for improving the privacy of such systems. The level of a synthetic masking signal is optimised to provide specified levels of intelligibility in the bright and dark sound zones and reduce the potential for annoyance of listeners
in the dark zone by responding to changes in ambient noise.
- Categories:
14 Views
- Read more about Direction of Arrival Estimation with Microphone Arrays Using SRP-PHAT and Neural Networks
- Log in to post comments
The Steered Response Power with phase transform (SRP-PHAT) is one of the most employed techniques for Direction of Arrival (DOA) estimation with microphone arrays due its robustness against acoustical conditions as reverberation or noise. Among its main drawbacks is the growth of its computational complexity when the search space increases. To solve this issue, we propose the use of Neural Networks (NN) to obtain the DOA as a regression problem from a low resolution SRP-PHAT power map.
- Categories:
213 Views
- Read more about On the Comparison of Two Room Compensation / Dereverberation Methods Employing Active Acoustic Boundary Absorption
- Log in to post comments
In this paper, we compare the performance of two active dereverberation techniques using a planar array of microphones and loudspeakers. The two techniques are based on a solution to the Kirchhoff-Helmholtz Integral Equation (KHIE). We adapt a Wave Field Synthesis (WFS) based method to the application of real-time 3D dereverberation by using a low-latency pre-filter design. The use of First-Order Differential (FOD) models is also proposed as an alternative method to the use of monopoles with WFS and which does not assume knowledge of the room geometry or primary sources.
- Categories:
24 Views
- Read more about Impact of Microphone Array Configurations on Robust Indirect 3D Acoustic Source Localization
- Log in to post comments
Acoustic source localization (ASL) is an important problem. Despite much attention over the past few decades, rapid and
- Categories:
20 Views
- Read more about MITIGATION OF NONLINEAR DISTORTION IN SOUND ZONE CONTROL BY CONSTRAINING INDIVIDUAL LOUDSPEAKER DRIVER CONTROL EFFORTS
- 1 comment
- Log in to post comments
Loudspeaker drivers are subject to nonlinear distortion in the low frequency range at high input levels. In sound zone control, distortion not only reduces the acoustic contrast between zones, but also gives perceived artefacts. Standard sound zone methods, such as acoustic contrast control, apply a constraint to the overall input power, but individual loudspeaker drivers are not controlled and the nonlinear distortion is mainly produced by the loudspeaker drivers with the highest input power.
Poster1.pdf
- Categories:
49 Views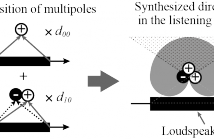
A method to create multipoles comprising a cluster of focused sources by using a linear loudspeaker array has recently been investigated. Directivities in a listening area were confirmed with examples of primitive multipoles such as dipoles and quadrupoles. This paper describes a method to create a sound source having more complex directivity by using a superposition of multipoles comprising a collection of focused sources.
- Categories:
42 Views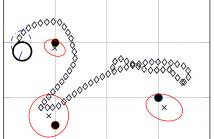
- Read more about Potential-field-based active exploration for acoustic simultaneous localization and mapping
- Log in to post comments
This paper presents a novel framework for active exploration in the context of acoustic \gls{SLAM} using a microphone array mounted on a mobile robotic agent. Acoustic \gls{SLAM} aims at building a map of acoustic sources present in the environment and simultaneously estimating the agent's own trajectory and position within this map. Two important aspects of this task are robustness against disturbances arising from reverberation and sensor imperfections and an appropriate degree of exploration to achieve high map accuracy.
slides.pdf
- Categories:
24 Views