
- Read more about Wireless location tracking via complex-domain Super MDS with time series self-localization information
- Log in to post comments
We propose a wireless localization algorithm based on complex-domain super multidimensional scaling (CD-SMDS) augmented with a self-localization (SL) component, whereby each target tracks its own motion by incorporating bearing in- formation, obtained e.g., from integrated inertial sensors.
- Categories:
 24 Views
24 Views
- Read more about Calibrating AI Models for Few-Shot Demodulation via Conformal Prediction
- Log in to post comments
Artificial Intelligent (AI) tools can be useful to address model deficits in the design of communication systems. However, conventional learning-based AI algorithms yield poorly calibrated decisions, unabling to quantify their outputs uncertainty. While Bayesian learning can enhance calibration by capturing epistemic uncertainty caused by limited data availability, formal calibration guarantees only hold under strong assumptions about the ground-truth, unknown, data generation mechanism.
- Categories:
33 Views
- Read more about Transient Analysis of Clustered Multitask Diffusion RLS Algorithm
- Log in to post comments
- Categories:
10 Views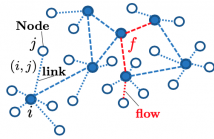
- Read more about Distributed Scheduling Using Graph Neural Networks
- Log in to post comments
A fundamental problem in the design of wireless networks is to efficiently schedule transmission in a distributed manner. The main challenge stems from the fact that optimal link scheduling involves solving a maximum weighted independent set (MWIS) problem, which is NP-hard. For practical link scheduling schemes, distributed greedy approaches are commonly used to approximate the solution of the MWIS problem. However, these greedy schemes mostly ignore important topological information of the wireless networks.
Zhao_ICASSP2021.pdf
- Categories:
197 Views
A consensus based distributed algorithm to compute
the spectral radius of a network is proposed. The spectral radius
of the graph is the largest eigenvalue of the adjacency matrix, and
is a useful characterization of the network graph. Conventionally,
centralized methods are used to compute the spectral radius, which
involves eigenvalue decomposition of the adjacency matrix of the
underlying graph. Our distributed algorithm uses a simple update
rule to reach consensus on the spectral radius, using only local
- Categories:
4 Views
- Read more about Differential Chaos Shift Keying-based Wireless Power Transfer
- Log in to post comments
In this work, we investigate differential chaos shift keying (DCSK), a communication-based waveform, in the context of wireless power transfer (WPT). Particularly, we present a DCSK-based WPT architecture, that employs an analog correlator at the receiver in order to boost the energy harvesting (EH) performance. By taking into account the nonlinearities of the EH process, we derive closed-form analytical expressions for the peak-to-average-power-ratio of the received signal as well as the harvested power.
- Categories:
17 Views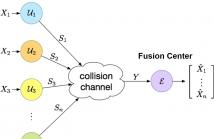
- Read more about An optimal symmetric threshold strategy for remote estimation over the collision channel
- Log in to post comments
A wireless sensing system with n sensors, observing independent and identically distributed continuous random variables with a symmetric probability density function, and one non-collocated estimator acting as a fusion center is considered. The sensors transmit information to the fusion center via a limited capacity communication medium modeled by a collision channel. It is assumed that there is no communication among the sensors prior to transmission, and the collision channel allows at most k<n simultaneous transmissions.
- Categories:
20 Views
- Categories:
20 Views
- Categories:
30 Views
- Read more about MSE Based Precoding Schemes For Partially Correlated Transmissions In Interference Channels
- Log in to post comments
In this paper, we consider interference channel model in which transmissions from multiple users are partially correlated. This correlation arises in wireless sensor network (WSN) scenarios and temporally correlated models. Considering this model, two minimum mean squared error (MSE) based precoding methods are derived. With these formulations, an iterative convergent procedure is formulated similar to a typical interference alignment (IA) algorithm. Simulations show that the second method provides the best sum rates for different correlation values.
poster2.pdf
- Categories:
9 Views