
IEEE ICAS 2021 is a premier international forum for presenting the technological advances and research results in the fields of theoretical, experimental, and applied Autonomous Systems (AS). IEEE International Conference on Autonomous Systems (ICAS 2021) is sponsored by IEEE Signal Processing Society (SPS) through IEEE SPS Autonomous Systems Initiative.

Object pose estimation remains an open and important task for autonomous systems, allowing them to perceive and interact with the surrounding environment. To this end, this paper proposes a 3D object pose estimation method that is suitable for execution on embedded systems. Specifically, a novel multi-task objective function is proposed, in order to train a Convolutional Neural Network (CNN) to extract pose-related features from RGB images, which are subsequently utilized in a Nearest-Neighbor (NN) search-based post-processing step to obtain the final 3D object poses.
- Categories:
 15 Views
15 Views
- Read more about Intelligent Intersection Coordination and Trajectory Optimization for Autonomous Vehicles
- Log in to post comments
IEEE ICAS.pdf
- Categories:
19 Views
Semantic image segmentation is an important functionality in various applications, such as robotic vision for autonomous cars, drones, etc. Modern Convolutional Neural Networks (CNNs) process input RGB images and predict per-pixel semantic classes. Depth maps have been successfully utilized to increase accuracy over RGB-only input. They can be used as an additional input channel complementing the RGB image, or they may be estimated by an extra neural branch under a multitask training setting.
- Categories:
48 Views
- Read more about On Securing Cloud-Hosted Cyber-Physical Systems Using Trusted Execution Environments
- Log in to post comments
Recently, cloud control systems have gained increasing attention from the research community as a solution to implement networked cyber-physical systems (CPSs). Such an architecture can reduce deployment and maintenance costs albeit at the expense of additional security and privacy concerns. In this paper, first, we discuss state-of-the-art security solutions for cloud control systems and their limitations. Then, we propose a novel control architecture based on Trusted Execution Environments (TEE).
ICAS2021.pdf
- Categories:
14 Views
- Read more about Information-Bottleneck-Based Behavior Representation Learning for Multi-agent Reinforcement Learning
- Log in to post comments
- Categories:
26 Views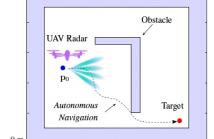
In this paper we consider a joint detection, mapping and navigation problem by an unmanned aerial vehicle (UAV) with real-time learning capabilities. We formulate this problem as a Markov decision process (MDP), where the UAV is equipped with a THz radar capable to electronically scan the environment with high accuracy and to infer its probabilistic occupancy map. The navigation task amounts to maximizing the desired mapping accuracy and coverage and to decide whether targets (e.g., people carrying radio devices) are present or not.
- Categories:
26 Views
In this study, a cyber-physical system (CPS) for river flow path control is proposed using reinforcement learning. Recently, there has been a frequent occurrence of river flooding due to heavy rains, resulting in serious economic losses and victims. One cause of river flooding is the meandering due to the river bed growing and flow path change. As a mean of avoiding the meandering, river groynes can be used to regularize the flow. However, the mechanism of the flow path growing, and its optimal control is unclear.
- Categories:
56 Views
- Read more about An Ensemble Learning Framework for Multi-class COVID-19 Lesion Segmentation from Chest CT Images
- Log in to post comments
The novel Coronavirus disease (COVID-19) has been the most critical global challenge over the past months. Lung involvement quantification and distinguishing the types of infections from chest CT scans can assist in accurate severity assessment of COVID-19 pneumonia, efficient use of limited medical resources, and saving more lives. Nevertheless, visual assessment of chest CT images and evaluating the disease severity by radiologists are expensive and prone to error.
- Categories:
75 Views
- Read more about Toward Semi autonomous Stiffness Adaptation of Pneumatic Soft Robots: Modeling and Validation
- Log in to post comments
- Categories:
19 Views
- Read more about An Off-Road Terrain Dataset Including Images Labeled With Measures of Terrain Roughness (Presentation Slides)
- Log in to post comments
- Categories:
36 Views