- Read more about MODULO EVENT-DRIVEN SAMPLING: SYSTEM IDENTIFICATION AND HARDWARE EXPERIMENTS
- Log in to post comments
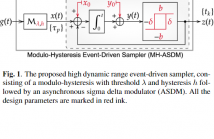
In event-driven sampling (EDS) the signal is represented in terms of a series of spikes at non-uniform time locations. Owing to the limited dynamic range (DR), just like how conventional analog-to-digital converters (ADC) suffer from signal saturation, in EDS a similar manifestation is observed. Namely, when the input exceeds a threshold, no output spikes are generated. Recently, the Unlimited Sensing Framework (USF) was presented to overcome the DR limitation. In USF, the key idea is to fold the signal using a modulo non-linearity so that its DR is fixed.
- Categories:
 29 Views
29 Views
- Read more about Near-field Tracking with Large Antenna Arrays: Fundamental Limits and Practical Algorithms
- Log in to post comments
Applications towards 6G have brought a huge interest towards arrays with a high number of antennas and operating within the millimeter and sub-THz bandwidths for joint communication, sensing, and localization.
With such large arrays, the plane wave approximation is often not accurate because the system may operate in the (radiating) near-field propagation region (i.e., the Fresnel region) where the electromagnetic field wavefront is spherical.
- Categories:
15 Views
- Read more about Multiplication-Avoiding Variant of Power Iteration with Applications
- Log in to post comments
Power iteration is a fundamental algorithm in data analysis. It extracts the eigenvector corresponding to the largest eigenvalue of a given matrix. Applications include ranking algorithms, principal component analysis (PCA), among many others. Certain use cases may benefit from alternate, non-linear power methods with low complexity. In this paper, we introduce multiplication-avoiding power iteration (MAPI).
poster.pdf
- Categories:
10 Views

- Read more about SPARSE-CODED DYNAMIC MODE DECOMPOSITION ON GRAPH FOR PREDICTION OF RIVER WATER LEVEL DISTRIBUTION
- Log in to post comments
This work proposes a method for estimating dynamics on graph by using dynamic mode decomposition (DMD) and sparse approximation with graph filter banks (GFBs). The motivation of introducing DMD on graph is to predict multi-point river water levels for forecasting river flood and giving proper evacuation warnings. The proposed method represents a spatio-temporal variation of physical quantities on a graph as a time-evolution equation. Specifically, water level observation data available on the Internet is collected by web scraping.
- Categories:
135 Views
- Read more about Fast and Robust ADMM for Blind Super-resolution
- Log in to post comments
Though the blind super-resolution problem is nonconvex in nature, recent advance shows the feasibility of a convex formulation which gives the unique recovery guarantee. However, the convexification procedure is coupled with a huge computational cost and is therefore of great interest to investigate fast algorithms. To do so, we adapt an operator splitting approach ADMM and combine it with a novel preconditioning scheme. Numerical results show that the convergence rate is significantly improved by around two orders of magnitudes compared to the currently most adopted solver CVX.
- Categories:
47 Views
- Read more about GENERAL TOTAL VARIATION REGULARIZED SPARSE BAYESIAN LEARNING FOR ROBUST BLOCK-SPARSE SIGNAL RECOVERY
- Log in to post comments
Block-sparse signal recovery without knowledge of block sizes and boundaries, such as those encountered in multi-antenna mmWave channel models, is a hard problem for compressed sensing (CS) algorithms. We propose a novel Sparse Bayesian Learning (SBL) method for block-sparse recovery based on popular CS based regularizers with the function input variable related to total variation (TV). Contrary to conventional approaches that impose the regularization on the signal components, we regularize the SBL hyperparameters.
- Categories:
28 Views
- Read more about MULTI-OBJECT TRACKING USING POISSON MULTI-BERNOULLI MIXTURE FILTERING FOR AUTONOMOUS VEHICLES
- Log in to post comments
The ability of an autonomous vehicle to perform 3D tracking is essential for safe planing and navigation in cluttered environments. The main challenges for multi-object tracking (MOT) in autonomous driving applications reside in the inherent uncertainties regarding the number of objects, when and where the objects may appear and disappear, and uncertainties regarding objects' states. Random finite set (RFS) based approaches can naturally model these uncertainties accurately and elegantly, and they have been widely used in radar-based tracking applications.
- Categories:
32 Views
- Read more about MULTI-OBJECT TRACKING USING POISSON MULTI-BERNOULLI MIXTURE FILTERING FOR AUTONOMOUS VEHICLES
- Log in to post comments
The ability of an autonomous vehicle to perform 3D tracking is essential for safe planing and navigation in cluttered environments. The main challenges for multi-object tracking (MOT) in autonomous driving applications reside in the inherent uncertainties regarding the number of objects, when and where the objects may appear and disappear, and uncertainties regarding objects' states. Random finite set (RFS) based approaches can naturally model these uncertainties accurately and elegantly, and they have been widely used in radar-based tracking applications.
- Categories:
23 Views