
ICASSP 2021 - IEEE International Conference on Acoustics, Speech and Signal Processing is the world’s largest and most comprehensive technical conference focused on signal processing and its applications. The ICASSP 2021 conference will feature world-class presentations by internationally renowned speakers, cutting-edge session topics and provide a fantastic opportunity to network with like-minded professionals from around the world. Visit website.

The identification of structural differences between a music performance and the score is a challenging yet integral step of audio-to-score alignment, an important subtask of music signal processing. We present a novel method to detect such differences between the score and performance for a given piece of music using progressively dilated convolutional neural networks. Our method incorporates varying dilation rates at different layers to capture both short-term and long-term context, and can be employed successfully in the presence of limited annotated data.
- Categories:
 190 Views
190 Views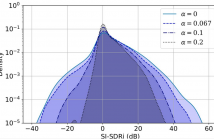
- Read more about (Poster) Unified Gradient Reweighting for Model Biasing with Applications to Source Separation
- Log in to post comments
Recent deep learning approaches have shown great improvement in audio source separation tasks. However, the vast majority of such work is focused on improving average separation performance, often neglecting to examine or control the distribution of the results. In this paper, we propose a simple, unified gradient reweighting scheme, with a lightweight modification to bias the learning process of a model and steer it towards a certain distribution of results. More specifically, we reweight the gradient updates of each batch, using a user-specified probability distribution.
- Categories:
25 Views
- Read more about MULTI-OBJECT TRACKING USING POISSON MULTI-BERNOULLI MIXTURE FILTERING FOR AUTONOMOUS VEHICLES
- Log in to post comments
The ability of an autonomous vehicle to perform 3D tracking is essential for safe planing and navigation in cluttered environments. The main challenges for multi-object tracking (MOT) in autonomous driving applications reside in the inherent uncertainties regarding the number of objects, when and where the objects may appear and disappear, and uncertainties regarding objects' states. Random finite set (RFS) based approaches can naturally model these uncertainties accurately and elegantly, and they have been widely used in radar-based tracking applications.
- Categories:
32 Views
- Read more about MULTI-OBJECT TRACKING USING POISSON MULTI-BERNOULLI MIXTURE FILTERING FOR AUTONOMOUS VEHICLES
- Log in to post comments
The ability of an autonomous vehicle to perform 3D tracking is essential for safe planing and navigation in cluttered environments. The main challenges for multi-object tracking (MOT) in autonomous driving applications reside in the inherent uncertainties regarding the number of objects, when and where the objects may appear and disappear, and uncertainties regarding objects' states. Random finite set (RFS) based approaches can naturally model these uncertainties accurately and elegantly, and they have been widely used in radar-based tracking applications.
- Categories:
23 Views
- Read more about Slides: Transcription Is All You Need: Learning To Separate Musical Mixtures With Score As Supervision
- Log in to post comments
Most music source separation systems require large collections of isolated sources for training, which can be difficult to obtain. In this work, we use musical scores, which are comparatively easy to obtain, as a weak label for training a source separation system. In contrast with previous score-informed separation approaches, our system does not require isolated sources, and score is used only as a training target, not required for inference.
- Categories:
23 Views
- Read more about Poster: Transcription Is All You Need: Learning To Separate Musical Mixtures With Score As Supervision
- Log in to post comments
Most music source separation systems require large collections of isolated sources for training, which can be difficult to obtain. In this work, we use musical scores, which are comparatively easy to obtain, as a weak label for training a source separation system. In contrast with previous score-informed separation approaches, our system does not require isolated sources, and score is used only as a training target, not required for inference.
- Categories:
14 Views
- Read more about Overcoming Measurement Inconsistency in Deep Learning for Linear Inverse Problems: Applications in Medical Imaging
- Log in to post comments
The remarkable performance of deep neural networks (DNNs) currently makes them the method of choice for solving linear inverse problems. They have been applied to super-resolve and restore images, as well as to reconstruct MR and CT images. In these applications, DNNs invert a forward operator by finding, via training data, a map between the measurements and the input images. It is then expected that the map is still valid for the test data. This framework, however, introduces measurement inconsistency during testing.
- Categories:
25 Views
- Read more about MULTI-DIRECTIONAL CONVOLUTION NETWORKS WITH SPATIAL-TEMPORAL FEATURE PYRAMID MODULE FOR ACTION RECOGNITION
- Log in to post comments
Recent attempts show that factorizing 3D convolutional filters into separate spatial and temporal components brings impressive improvement in action recognition. However, traditional temporal convolution operating along the temporal dimension will aggregate unrelated features, since the feature maps of fast-moving objects have shifted spatial positions. In this paper, we propose a novel and effective Multi-Directional convolution (MDConv), which extracts features along different spatial-temporal orientations.
poster-4.pdf
- Categories:
26 Views
The paper deals with the hitherto neglected topic of audio dequantization. It reviews the state-of-the-art sparsity-based approaches and proposes several new methods. Convex as well as non-convex approaches are included, and all the presented formulations come in both the synthesis and analysis variants. In the experiments the methods are evaluated using the signal-to-distortion ratio (SDR) and PEMO-Q, a perceptually motivated metric.
- Categories:
17 Views
- Read more about Continuous CNN for Nonuniform Time Series
- Log in to post comments
CNN for time series data implicitly assumes that the data are uniformly sampled, whereas many event-based and multi-modal data are nonuniform or have heterogeneous sampling rates. Directly applying regular CNN to nonuniform time series is ungrounded, because it is unable to recognize and extract common patterns from the nonuniform input signals. In this paper, we propose the Continuous CNN (\myname), which estimates the inherent continuous inputs by interpolation, and performs continuous convolution on the continuous input.
- Categories:
33 Views