
- Read more about Converting RLBWT to LZ77 in smaller space
- 1 comment
- Log in to post comments
RLBWT2LZ77.pdf
- Categories:
 56 Views
56 Views
- Read more about Learning Tucker Compression for Deep CNN
- 1 comment
- Log in to post comments
Recently, tensor decomposition approaches are used to compress deep convolutional neural networks (CNN) for getting a faster CNN with fewer parameters. However, there are two problems of tensor decomposition based CNN compression approaches, one is that they usually decompose CNN layer by layer, ignoring the correlation between layers, the other is that training and compressing a CNN is separated, easily leading to local optimum of ranks. In this paper, Learning Tucker Compression (LTC) is proposed.
164-Paper.pdf
- Categories:
173 Views
- Read more about Datastructure Lower Bounds for Depth First Search
- Log in to post comments
- Categories:
30 Views
- Categories:
101 Views
- Read more about Binary-Coded Ternary Number Representation in Natural Language Text Compression
- 3 comments
- Log in to post comments
A lossless data compression code based on a binary-coded ternary number representation is investigated. The code is synchronizable and supports a direct search in a compressed file. A simple monotonous encoding and very fast decoding algorithms are constructed owing to code properties. Experiments show that in natural language text compression the new code outperforms byte-aligned codes SCDC and RPBC either in compression ratio or in decoding speed.
- Categories:
142 Views
- Read more about Chunk Content is not Enough: Chunk-Context Aware Resemblance Detection for Deduplication Delta Compression
- Log in to post comments
With the growing popularity of cloud storage, identifying and removing duplicate data across users is getting more critical for service providers. Thus, many researchers have attracted attention for data resemblance to detect redundancy among similar data. It uses feature extraction to detect data chunks with high similarity first, and then treat them as candidates for removing redundancy.
- Categories:
179 Views
We introduce a new method for generating color images from sketches or edge maps. Current methods either require some form of additional user-guidance or are limited to the ``paired’’ translation approach. We argue that segmentation information could provide valuable guidance for sketch colorization. To this end, we propose to leverage semantic image segmentation, as provided by a general purpose panoptic segmentation network, to create an additional adversarial loss function. Our loss function can be integrated to any baseline GAN model.
- Categories:
67 Views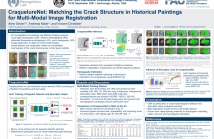
- Read more about CraquelureNet: Matching the Crack Structure in Historical Paintings for Multi-Modal Image Registration
- Log in to post comments
Visual light photography, infrared reflectography, ultraviolet fluorescence photography and x-radiography reveal even hidden compositional layers in paintings. To investigate the connections between these images, a multi-modal registration is essential. Due to varying image resolutions, modality dependent image content and depiction styles, registration poses a challenge. Historical paintings usually show crack structures called craquelure in the paint.
- Categories:
79 Views
Energy resolved neutron imaging (ERNI) is an advanced neutron radiography technique capable of non-destructively extracting spatial isotopic information within a given material. Energy-dependent radiography image sequences can be created by utilizing neutron time-of-flight techniques. In combination with uniquely characteristic isotopic neutron crosssection spectra, isotopic areal densities can be determined on a per-pixel basis, thus resulting in a set of areal density images for each isotope present in the sample.
- Categories:
26 Views