- Read more about Blind Image Deconvolution Using Student’s-t Prior With Overlapping Group Sparsity
- Log in to post comments
In this paper, we solve blind image deconvolution problem that is to remove blurs form a signal degraded image without any knowledge of the blur kernel. Since the problem is ill-posed, an image prior plays a significant role in accurate blind deconvolution. Traditional image prior assumes coefficients in filtered domains are sparse. However, it is assumed here that there exist additional structures over the sparse coefficients. Accordingly, we propose new problem formulation for the blind image deconvolution, which utilize the structural
- Categories:
 20 Views
20 Views- Read more about AN ACCURATE METHOD FOR FREQUENCY ESTIMATION OF A REAL SINUSOID
- Log in to post comments
It is well known that the positive- and negative frequency components of a real sinusoid spectrally interact with each other; thus, introducing bias in frequency estimation based on the periodogram maximization. We propose to filter out the negative-frequency component. To that end, a coarse frequency estimation is obtained using the windowing approach, known to reduce the estimation bias, and then used to filter out the negative frequency component via modulation and discrete Fourier transform
- Categories:
57 Views
- Read more about Fast and Stable Signal Deconvolution via Compressible State-Space Models
- Log in to post comments
Objective: Common biological measurements are in
the form of noisy convolutions of signals of interest with possibly
unknown and transient blurring kernels. Examples include EEG
and calcium imaging data. Thus, signal deconvolution of these
measurements is crucial in understanding the underlying biological
processes. The objective of this paper is to develop fast and
stable solutions for signal deconvolution from noisy, blurred and
undersampled data, where the signals are in the form of discrete
- Categories:
48 Views
- Read more about Fast Computations for Approximation and Compression in Slepian Spaces
- Log in to post comments
The discrete prolate spheroidal sequences (DPSS's) provide an efficient representation for signals that are perfectly timelimited and nearly bandlimited. Unfortunately, because of the high computational complexity of projecting onto the DPSS basis -- also known as the Slepian basis -- this representation is often overlooked in favor of the fast Fourier transform (FFT). In this presentation, we show that there exist fast constructions for computing approximate projections onto the leading Slepian basis elements.
- Categories:
6 Views
- Read more about POWER LINE DETECTION VIA BACKGROUND NOISE REMOVAL
- Log in to post comments
Tiny target detections, especially power line detection, have received great attention due to its critical role in ensuring the
flight safety of low-flying unmanned aerial vehicles (UAVs). In this paper, an accurate and robust power line detection method is proposed, wherein background noise is mitigated by an embedded convolution neural network (CNN) classifier before conducting the final power line extractions. Our
- Categories:
46 Views
- Read more about DICTIONARY LEARNING FOR SPARSE REPRESENTATION USING WEIGHTED L1-NORM
- Log in to post comments
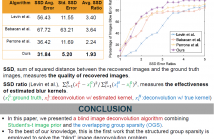
An efficient algorithm for overcomplete dictionary learning with l_p-norm as sparsity constraint to achieve sparse representation from a set of known signals is presented in this paper. The special importance of the l_p-norm (0<p<1) has been recognized in recent studies on sparse modeling, which can lead to stronger sparsity-promoting solutions than the l_1-norm. The l_p-norm, however, leads to a nonconvex optimization problem that is difficult to solve efficiently.
GSIPPOSTER.pdf
- Categories:
19 Views
- Read more about Approximate Support Recovery of Atomic Line Spectral Estimation: A Tale of Resolution and Precision
- Log in to post comments
This work investigates the parameter estimation performance of super-resolution line spectral estimation using atomic norm minimization. The focus is on analyzing the algorithm's accuracy of inferring the frequencies and complex magnitudes from noisy observations. When the Signal-to-Noise Ratio is reasonably high and the true frequencies are separated by $O(\frac{1}{n})$, the atomic norm estimator is shown to localize the correct number of frequencies, each within a neighborhood of size $O(\sqrt{\frac{\log n}{n^3}} \sigma)$ of one of the true frequencies.
- Categories:
22 Views
- Read more about Robust Estimation of Self-Exciting Point Process Models with Application to Neuronal Modeling
- Log in to post comments
We consider the problem of estimating discrete self- exciting point process models from limited binary observations, where the history of the process serves as the covariate. We analyze the performance of two classes of estimators: l1-regularized maximum likelihood and greedy estimation for a discrete version of the Hawkes process and characterize the sampling tradeoffs required for stable recovery in the non-asymptotic regime. Our results extend those of compressed sensing for linear and generalized linear models with i.i.d.
- Categories:
20 Views
- Read more about Two interesting and easy-to-follow tutorials: signal energy and ZCR
- Log in to post comments
Both the articles I referenced in this document play the role of tutorials that introduce some feature extraction (FE) approaches based on signal energy and zero-crossing rates (ZCRs). They offer cutting-edge algorithms in which the feasibility of a balance among creativity, simplicity, and accuracy constitutes the main motivation. The theory presented, smoothly shown and accompanied by numerical examples, is complemented with source-codes in C/C++ programming language and interesting applications on neurophysiological signal processing, speech processing and image processing.
- Categories:
30 Views- Read more about Performance Analysis for Pilot-based 1-bit Channel Estimation with Unknown Quantization Threshold
- Log in to post comments
Parameter estimation using quantized observations is of importance in many practical applications. Under a symmetric 1-bit setup, consisting of a zero-threshold hard limiter, it is well known that the large sample performance loss for low signal-to-noise ratios (SNRs) is moderate (2/pi or -1.96dB). This makes low-complexity analog-to-digital converters (ADCs) with 1-bit resolution a promising solution for future wireless communications and signal processing devices.
- Categories:
65 Views